Programming a surface grinding robot sounds like rocket science, but sophisticated systems such as Flexmill make it much easier than in the early days. However, robot programming is not only about coding the robot to follow the desired path. It requires a lot of preparation and in-depth surface grinding process, understanding getting the robot to use the right tools in the most optimal way for each application. This article explains our best-practice process from preparation to the first production runs and optimization!
Robot programming is fairly straightforward nowadays. However, it is just the tip of the iceberg compared to all the preparations you need to do before programming. You must examine the workpiece carefully, create a detailed feature map, study robot reachability, optimize the processing strategy, program the robot, run trials, and finally optimize during the first production runs. Here’s our best-practice process in detail!
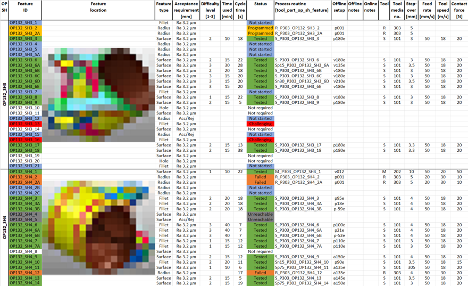
Examine the manufacturing drawing, the actual workpiece, and its 3D model to identify all the features. Create a feature map, i.e., a document listing, naming, and describing the features on the workpiece. The feature map defines the Scope of Work (SoW), showing how many and what types of tasks processing the workpiece involves. Organize the individual features in sequential order so that the map can be used for programming and monitoring progress. A high-quality feature map is the single most valuable piece of intellectual property (IP) in your production process!
The feature map is a useful tool for process developers and project managers to keep track of the programming progress and possible difficulties.
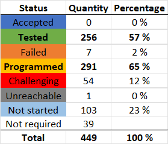
Verify whether the robot system can reach all the listed features using its simulation model. Complement the feature map with reachability information identifying which features can/cannot be reached. As a result, you get to know the share (%) of tasks that can be robotized and estimate cycle time (if the process speed is known).
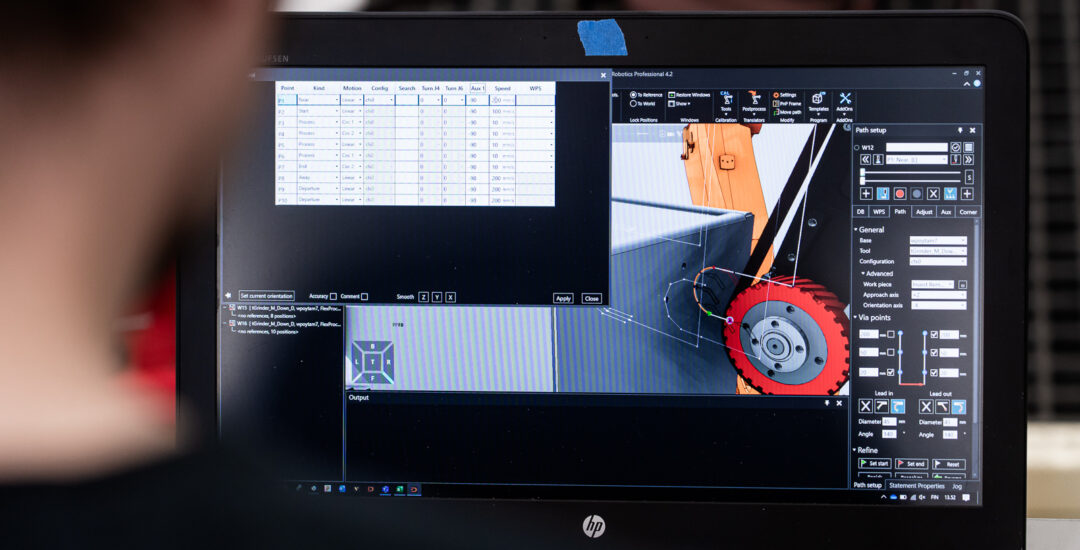
Robot programming comprises several steps, starting from creating movement programs for each feature individually with the same start and stop positions. Create a processing strategy for the workpiece defining the optimal order of executing the features, when to use sensing, when to change tools, and so on. Finally, create a Master program (name it after the drw number) that calls the feature and other support programs in the correct sequence to complete the workpiece.
RELATED: How to Choose the Right Robot Programming Method for Your Surface Grinding Application?
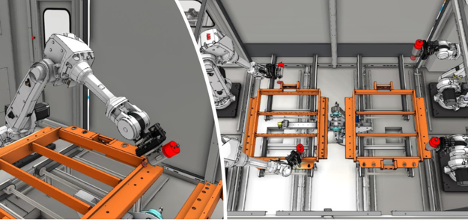
Define the processing solution required for the workpiece, including abrasives, tools, compliance unit, disc changer, and more. Once you have the solution and components installed, we recommend running the feature programs with the production system to verify that all stages pass flawlessly.
Observe the first production runs carefully while constantly optimizing the Master program cycle to achieve the best possible results and production efficiency.
Robotics has evolved dramatically over the past decades. Robots are getting smarter, faster, and easier every day. Regardless of all technological advances, in-depth process knowledge is still the most critical asset in robotic surface grinding. We have decades of experience automating the most challenging surface grinding processes with tens of customers worldwide. We are glad to help you with all your tricky robotization questions! Contact us here!





Download our investment calculator with best-practice industry input values, helping you to create a convincing business...

World leading abrasives and power tools manufacturer Mirka Ltd. announces Finnish robotics company...

Our previous article described the best-practice process for programming a surface grinding robot. During that process, you have to make...