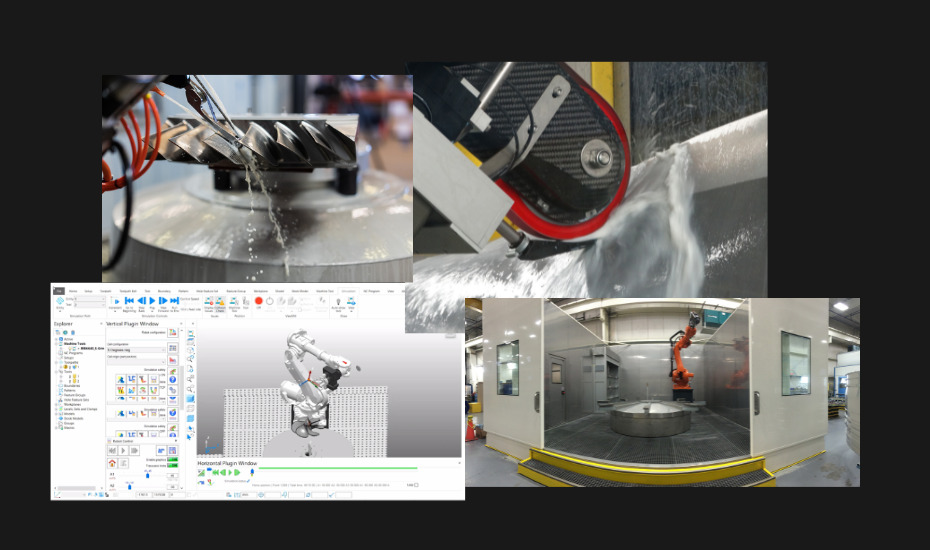
Our previous article described the best-practice process for programming a surface grinding robot. During that process, you have to make a tricky decision: Which programming method to use? This blog introduces the most popular online and offline programming methods and their pros and cons, and explains which one you should choose for your surface grinding application!
Programming a surface grinding robot is a challenging process. It requires in-depth process knowledge and a lot of preparation before you can even start programming. Choosing the right programming method for your application among the many possible alternatives depends on several factors (there is no one-size-fits-all method). We will introduce and compare the most popular online and offline methods used in surface grinding in the following.
RELATED: Surface Grinding Robot Programming – 5-Step Process from Preparation to Optimization
The comparison table below provides a quick glimpse at the most common surface grinding scenarios in industrial manufacturing settings with the most suitable robot programming method.
| Production Scenario | Offline Programming | Online Programming |
| One simple workpiece, high volume | ✅ | |
| Complicated workpiece | ✅ | |
| Low production volume | ✅ | |
| Several/frequent NPIs | ✅ |
Online programming is typically the best method if you have one high-volume product with a few features. However, teaching requires extensive use of robot time and thus provides a poor time-to-program vs. time-to-produce balance if you have a low production volume, complicated workpieces, or frequent New Product Introductions (NPI). Additionally, online teaching is inflexible – the entire operation has to be repeated, even for minor changes in the path.
In the case of multiple products, complex programs, and frequent NPIs, offline systems provide the most optimal programming method because they are fast and don’t occupy the production robot for a long time. The operator can take full advantage of the robot’s accuracy and other capabilities, making offline programming optimal for complicated products. Offline programming provides the best time-to-program vs. time-to-produce balance for frequent New Product Introductions. In the case of workpieces with clear parametric geometries, you can use macro programming to maximize efficiency.
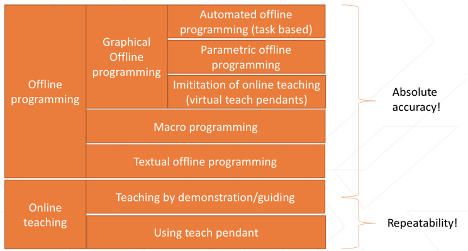
The teaching pendant is the most popular method for robot programming. According to the British Automation and Robot Association, over 90% of robots are programmed using this method. The robot teaching pendant looks like a giant calculator, although they have evolved from large gray boxes with magnetic tape storage to modern touchscreen tablets. The operator uses buttons on the pendant to move the robot point-to-point and to save each position along the path. The robot can play back the path at full speed when the whole program has been taught.
Demonstrating and guiding is the oldest programming method. The operator leads the robot through the desired path by hand from one position to the next and saves the positions in the memory. This requires releasing the brakes and allowing the robot to “follow” the hand. This is similar to teaching using a pendant and is based on repeatability accuracy.
Today many robot manufacturers offer force/torque sensors and software for teaching and guiding or specific demonstration tools, i.e., a handheld device allowing the operator to point and record positions for the robot program. This method is similar to offline programming and uses absolute accuracy.
Offline Programming (OLP) means programming robots outside the production environment. Offline Programming enables operators to program complex geometries quickly while utilizing the maximum accuracy and capabilities of the robot system. OLP eliminates production downtime caused by online teaching on the shop floor. The are several types of OLP systems:
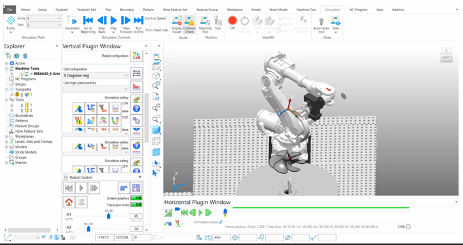
Augmented Reality (AR) and Virtual Reality (VR) allow robot programming safely without interrupting the real production robot. The operator can teach the entire task workflow in the virtual environment, guiding the robot from one point to another using a VR headset (goggles) and handheld pointers. The generated program is uploaded to the real robot.
Macro offline programming is the fastest way to produce code for a robot. It is ideal for features that can be broken down into parametric forms, such as arcs and lines, and the geometry is relatively simple (e.g., two-dimensional parts). Automated and semi-automated macro-programming are the most efficient methods.
In conclusion, choosing the right robot programming method for surface grinding is a crucial decision that requires considering several factors. Online programming is best suited for high-volume products with few features, while offline programming provides the most optimal programming method for multiple products, complex programs, and frequent new product introductions. The use of teaching pendants, demonstrating and guiding, graphical UI, VR, and macros are some of the popular programming methods. Each method has its own set of advantages and disadvantages, and selecting the most suitable method will depend on the specific production scenario. Ultimately, by choosing the right programming method, operators can program robots with maximum accuracy and capabilities, improving production efficiency, and reducing production downtime.





Download our investment calculator with best-practice industry input values, helping you to create a convincing business...

World leading abrasives and power tools manufacturer Mirka Ltd. announces Finnish robotics company...

Our previous article described the best-practice process for programming a surface grinding robot. During that process, you have to make...