How to define manufacturing in the 2020s? Produce more, better, faster, and cheaper! Unfortunately, this brutal definition could be close to reality. Quick production ramp-up has become critical for manufacturers to win contracts in today’s cut-throat markets. But, how to accelerate ramp-up time while also reducing waste and costs?
Lauri Nousiainen, the Process Development Manager of Flexmill, has got the answer. He used Design of Experiments (DOE) to build a library of grinding process parameters for countless material/tool media combinations. This library now helps the users of Flexmill’s surface grinding robots to quickly choose the correct parameters for each New Product Introduction (NPI) to meet the desired output quality. It radically accelerates ramp-up, reduces waste, and mitigates production risks, enabling manufacturers to win new contracts profitably.
In this article, Lauri Nousiainen explains the main challenges of robotic surface finishing process design and how DOE now helps manufacturers ramp production faster.
The industrial manufacturing market outlook in the 2020s is challenging. Industrial buyers order more advanced components with increasingly complex geometries and higher quality ambitions. Manufacturers must produce small batches with short lead times, making new product introduction (NPI) challenging. They are constantly seeking quicker ways to ramp up production. However, merely deploying more robots on the line is no longer enough. The ramp-up time depends on how quickly you can define the right process parameters to program the robots optimally, minimizing material waste and test runs. In-depth process knowledge is crucial for manufacturers to steepen their learning curve at each NPI.
Surface finishing is one of the few areas of the industrial manufacturing process yet to be robotized. While welding robots have been used increasingly for several years, surface finishing was historically handled manually. This was possible because an abundant, low-cost workforce was willing to grab manual disc-grinders and do the job. Health and safety issues were not considered back in the day. Things have changed radically. Manual grinding is now considered highly health-depriving, monotonous, and hard work. It is nearly impossible to find motivated and skilled enough grinding workers anymore.
Today’s modern, automated grinding robots can smoothen welds 3-5 times faster than a human, so manufacturers are now investing in grinding robots – the global grinding machines market is growing at a CAGR of up to 5.7 percent. A grinding robot increases productivity and quality while enabling a stable process flow and improving health conditions on the shop floor. However, simply putting a grinding robot on an industrial process will not help manufacturers. The challenge is how to optimize the grinding process parameters to achieve the required output quality with minimum material waste and test runs?
Ramping production for a new workpiece such as a turbine blade kicks off the NPI process. To achieve a finished product’s required quality level (e.g., roughness), the process designer must select the most suitable tool media, plan the right finishing strategies, and define the optimal grinding parameters. However, there are countless combinations of parameters to test. The adjustments made between the repetitive test runs are based on rough, approximate observations. When the required surface roughness is finally deemed achieved, the parameters can still be far from optimal, actually. Without a systematic approach, the optimization process can take weeks, occupying a robot and engineer full time.
Lauri Nousiainen, the Process Development Manager at Flexmill, believes in systematic approaches when solving any challenge he is put up against. He had a vision of a mathematical model that describes the relations between the grinding process parameters and output quality so that process designers working with Flexmill grinding robots wouldn’t have to repeat the same tests at every NPI. In his M.Sc. thesis, Nousiainen used the Design of Experiments (DOE) method to implement the model that would finally put an end to grinding processes designed by guesstimations!
Experimental design, or design of experiments (DOE), is a systematic method to discover the relations between the factors affecting a process and its outputs, i.e., the cause-and-effect relationships. It is an effective approach for planning experiments so that the obtained data can be analysed to produce objective and valid conclusions to optimize the output. DOE was introduced in the 1920s in agriculture by R. A. Fisher. Since then, it has been improved and used in various industrial applications.
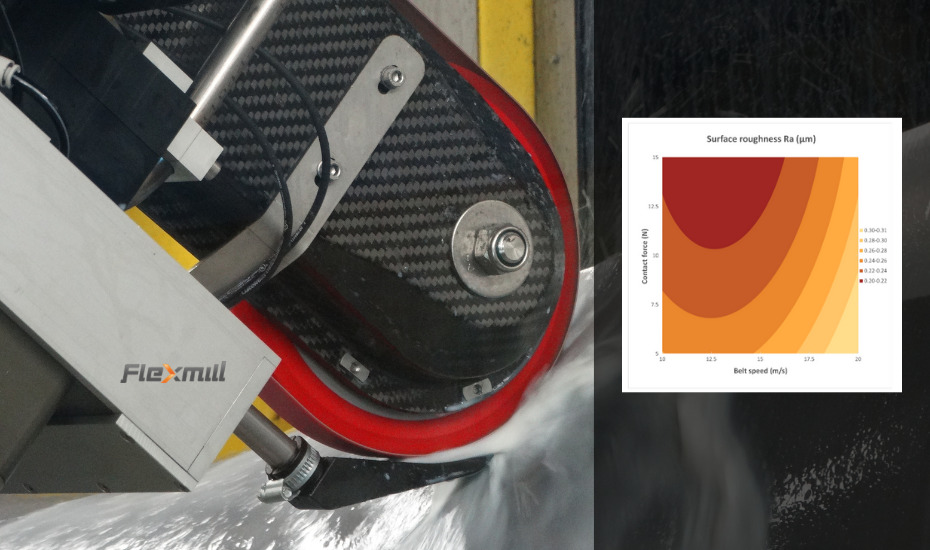
Using the experimental design in his thesis, Nousiainen identified a handful of grinding parameters with the most significant impact on output quality, including rotational speed and contact force. So, instead of examining tens of parameters in every test, the narrowed-down scope reduced workload and sped up the process. He performed the same set of tests for each material and tool media combination, with three different values for each grinding parameter. All combinations were tested, and the resulting surface roughness (Ra) was measured after each run. The parameters known to have a negligible effect were kept constant. Finally, Nousiainen used regression analysis to derive a function describing the relation between the grinding parameters (inputs) and surface roughness (output). This function can be drawn as a contour plot (image) to easily visualize where the optimal parameter combination can be found. For each material/tool media combination, a similar contour plot is created and stored in the process parameter library.

Contour plot example.
Can Nousiainen’s thesis and DOE, the 100-year-old statistical method, make a difference in today’s highly-advanced, robotic surface grinding? The answer is yes! Flexmill has built a vast library of optimal process parameters for various surface finishing platforms and materials based on this method. It now helps manufacturers and industrial service providers using Flexmill’s grinding robots to choose the correct parameters for each NPI quickly. The process parameter library can radically accelerate manufacturers’ ramp-up time, reduce waste, and mitigate production risks while increasing profitability in the long run!
About the Author
Lauri Nousiainen is the Process Development Manager at Flexmill, the global surface finishing automation, and robotization leader. In addition to managing process development, his responsibilities include offline programming, simulation, feasibility studies, sales support, and process parameter library management, among many others. Nousiainen holds a Master of Science degree in Automation and Electrical Engineering from Aalto University in Helsinki, Finland.
About Flexmill
Flexmill develops intelligent robotic surface finishing solutions for manufacturers and processing service providers in industries such as aerospace, marine, energy, and steel fabrication. More than 70 companies worldwide, including Rolls Royce, Wärtsilä, Collins Aerospace, and GKN, automate their grinding processes with Flexmill. Flexmill is owned by the world-leading abrasives and power tools manufacturer Mirka Ltd.





Download our investment calculator with best-practice industry input values, helping you to create a convincing business...

World leading abrasives and power tools manufacturer Mirka Ltd. announces Finnish robotics company...

Our previous article described the best-practice process for programming a surface grinding robot. During that process, you have to make...